
概要
本検証では、Raspberry Pi 5 をアクセスポイント(AP)として構成し、
ローカルネットワークとインターネット接続を分離した「持ち運び可能なネットワーク環境」を構築しました。
これにより、以下が可能になります。
- 現場にそのまま持ち込める検証環境
- ネットワーク環境に依存しないデモ・テスト
- ROS2 / Arduino / PC の統合検証
技術的なポイントというより、「環境をそのまま持ち運べること」が最大の価値です。
以下の構成(写真)として、
Raspberry Pi 5、Arduino UNO R4、モバイルルーター(インスタントWiFi)、PCを
設定を変えずにそのまま持ち運び、デモやテストを行うことができます。
現場ごとにWiFi設定やIPアドレスの再設定を行う必要がなく、
どこでも同じ環境をそのまま再現できる構成です。

ネットワーク構成
ローカルネットワーク(Raspberry Pi AP)
Raspberry Pi 5 (WiFi AP)
│
WiFiネットワーク
│
Arduino / PC / ROS2
- Raspberry Pi をアクセスポイント化
- Arduino / PC / ROS2ノードを同一ネットワークに接続
- 完全に閉じたローカル環境を構築
インターネット接続(別系統)
インターネット
│
有線LAN、またはwifiドングル
│
Raspberry Pi 5
- 有線LAN または USB WiFiドングルで外部接続
- AP側とは分離した経路
- 必要に応じてインターネット接続を利用可能
設定方法(概要)
NetworkManager を使用して構成しています。
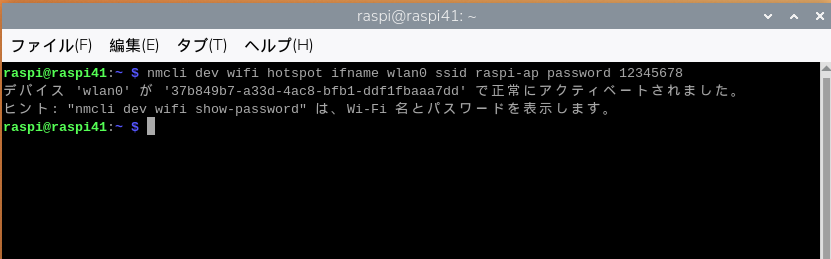
AP(アクセスポイント)の作成
nmcli dev wifi hotspot ifname wlan0 ssid raspi-ap password 12345678
※ 環境によりインターフェース名(wlan0等)は異なります。
この場合は、ssid:raspi-ap pasword:12345678が設定されました。
IPアドレス確認コマンド
ip a
- AP側インターフェースのIPを確認 ここでは、10.42.0.1を確認
- PCから疎通確認 PCからは通常のwifi接続でraspi-apに接続確認
- PCとArduino 以下のプログラムでraspi-apに接続
https://robo-poc.biz/?p=151
外部回線の接続
- 有線LANを接続 → 自動でインターネット接続
- またはUSB WiFiドングルで別系統接続 → wifiからインターネット接続
動作確認
① 二系統ネットワークの確認
- AP接続したPCからインターネット閲覧可能
- 以下の2パターンを確認
- 有線LAN接続時
- WiFiドングル接続時
どちらでも「ローカル + インターネット」の同時利用が可能であることを確認
② Arduino(要素検証との統合)
要素検証で実施した Arduino UNO R4 のブラウザ操作を統合
- ローカルネットワーク内からアクセス(この例では10.42.0.98にアクセス)
- ON / OFF 操作が問題なく実行できることを確認
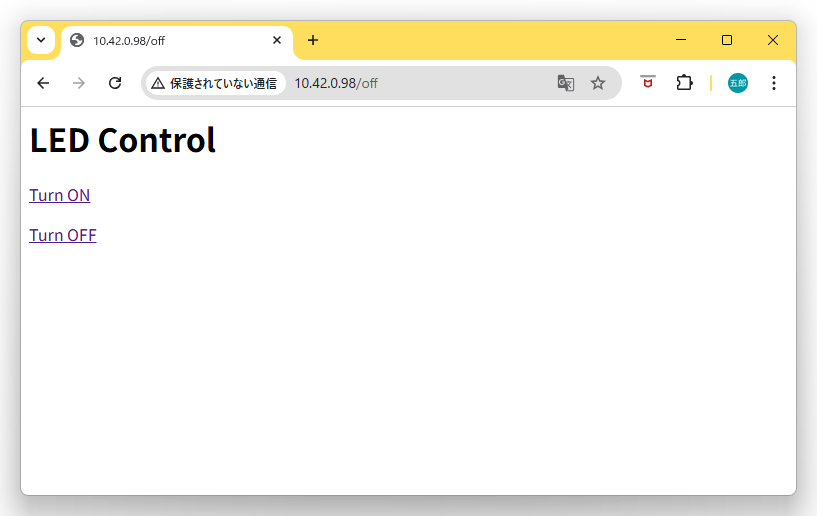
👉 ローカル完結の制御系が成立
③ 外部ネットワークからの接続
Raspberry Pi Connect を使用
- 別ネットワーク(モバイル回線など)から接続
- Raspberry Pi をリモート操作可能
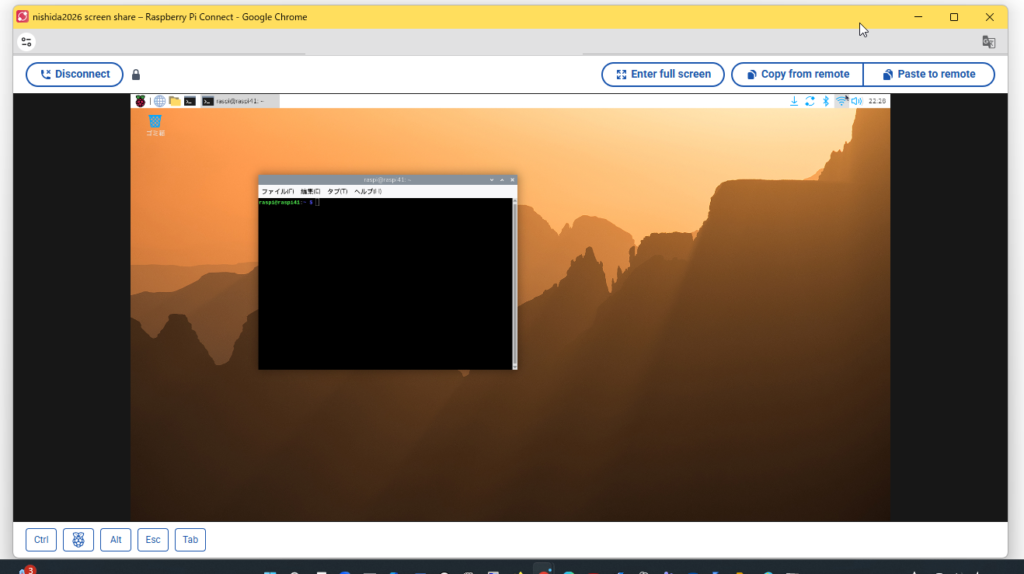
👉 現場設置 + 遠隔操作が可能
結果
本構成により、以下が実現できました。
- ローカルネットワーク(制御系)
- インターネット接続(管理・外部連携)
- 遠隔アクセス(raspi connect)
これらをすべて「一体の構成」として持ち運び可能です。
まとめ
本検証のポイントは技術そのものではなく、以下にあります。
- ネットワーク環境を“持ち運べる”こと
- 現場でそのまま再現できること
- 外部環境に依存しないこと
特にロボットやIoTの実証では、
- 「現場で動かない」
- 「ネットワークが違う」
という問題が頻発します。
本構成は、それらを回避する実用的な方法の一例です。